Qiao Sun
Welcome, I am Qiao Sun, a research assistant in MARS Lab at Tsinghua University and Shanghai QiZhi Institue, advised by Prof. Hang Zhao.
I am interested in building realistic behavior simulations for motion prediction and planning systems for autonomous driving vehicles. I believe modeling human behaviors during interactions is the pivotal problem to solve for autonomous driving in urban areas. My research focuses on building and leveraging simulations to empower machines to learn a safe and efficient driving policy with crowded human road users.

Publications
Large Trajectory Models are Scalable Motion Predictors and Planners
Qiao Sun, Shiduo Zhang, Danjiao Ma, Jingzhe Shi, Derun Li, Simian Luo, Yu Wang, Ningyi Xu, Guangzhi Cao, Hang Zhao
arXiv, 2023
Project Page /
Qiao Sun, Shiduo Zhang, Danjiao Ma, Jingzhe Shi, Derun Li, Simian Luo, Yu Wang, Ningyi Xu, Guangzhi Cao, Hang Zhao
arXiv, 2023
Project Page /
@article{sun2023large,
author = {Qiao Sun and Shiduo Zhang and Danjiao Ma and Jingzhe Shi and Derun Li and Simian Luo and Yu Wang and Ningyi Xu and Guangzhi Cao and Hang Zhao},
title = {Large Trajectory Models are Scalable Motion Predictors and Planners},
booktitle = {arXiv},
year = {2023},
}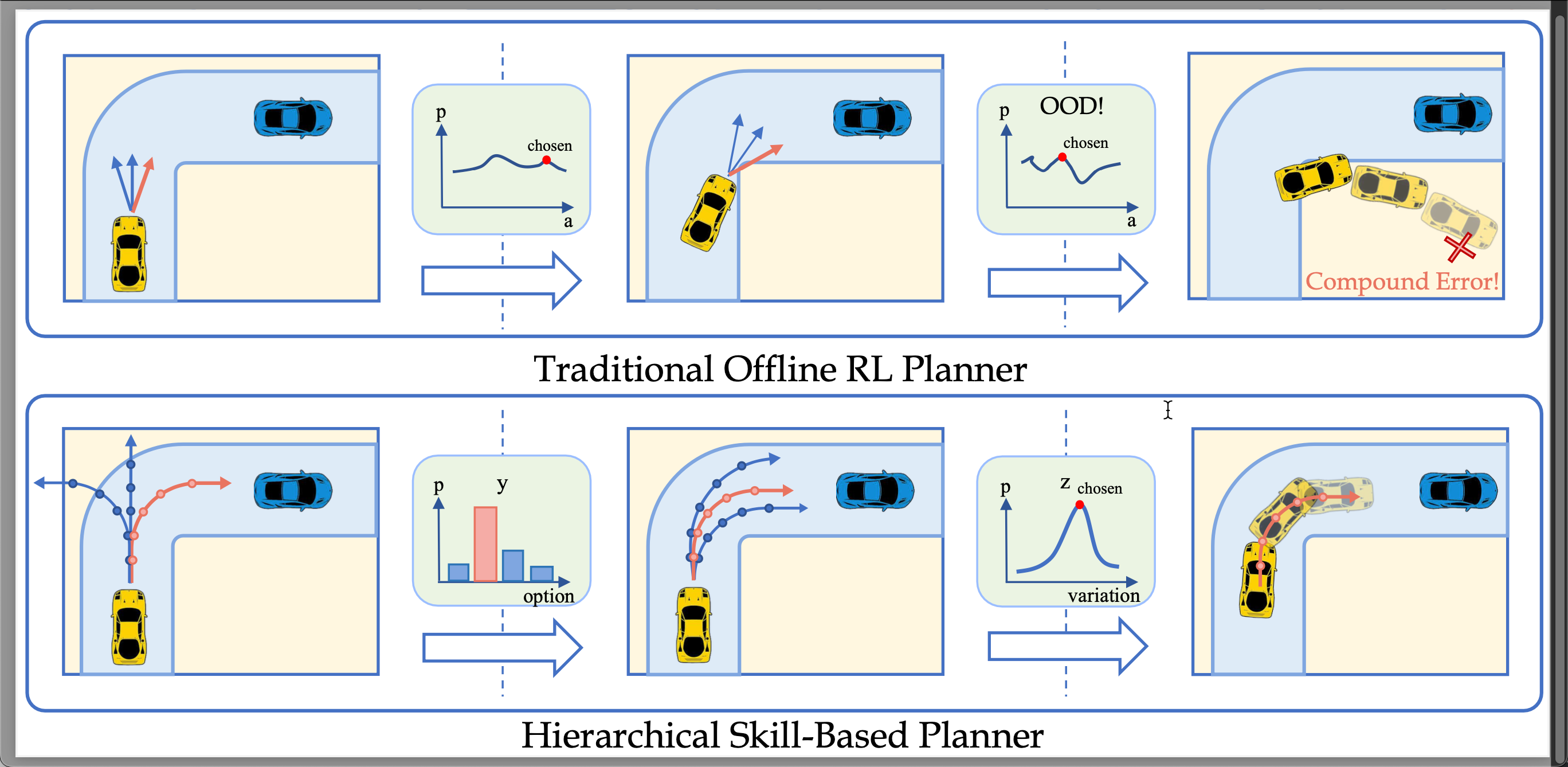
Boosting Offline Reinforcement Learning for Autonomous Driving with Hierarchical Latent Skills
Zenan Li, Fan Nie, Qiao Sun, Fang Da, Hang Zhao
arXiv, 2023
Project Page /
Zenan Li, Fan Nie, Qiao Sun, Fang Da, Hang Zhao
arXiv, 2023
Project Page /
@article{li2023boosting,
author = {Zenan Li and Fan Nie and Qiao Sun and Fang Da and Hang Zhao},
title = {Boosting Offline Reinforcement Learning for Autonomous Driving with Hierarchical Latent Skills},
booktitle = {arXiv},
year = {2023},
}
P4P: Conflict-Aware Motion Prediction for Planning in Autonomous Driving
Qiao Sun, Xin Huang, Brian Williams, Hang Zhao
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Project Page /
Qiao Sun, Xin Huang, Brian Williams, Hang Zhao
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Project Page /
@InProceedings{Sun:2022ab,
author = {Qiao Sun and Xin Huang and Brian Williams and Hang Zhao},
title = {P4P: Conflict-Aware Motion Prediction for Planning in Autonomous Driving},
booktitle = {2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2022},
}
InterSim: Interactive Traffic Simulation via Explicit Relation Modeling
Qiao Sun, Xin Huang, Brian Williams, Hang Zhao
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Project Page / Code /
Qiao Sun, Xin Huang, Brian Williams, Hang Zhao
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
Project Page / Code /
@InProceedings{Sun:2022aa,
author = {Qiao Sun and Xin Huang and Brian Williams and Hang Zhao},
title = {InterSim: Interactive Traffic Simulation via Explicit Relation Modeling},
booktitle = {2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2022},
}
M2I: From Factored Marginal Trajectory Prediction to Interactive Prediction
Qiao Sun, Xin Huang, Junru Gu, Brian Williams, Hang Zhao
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
Project Page / Code /
Qiao Sun, Xin Huang, Junru Gu, Brian Williams, Hang Zhao
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
Project Page / Code /
@InProceedings{Sun_2022_CVPR,
author = {Qiao Sun and Xin Huang and Junru Gu and Brian Williams and Hang Zhao},
title = {M2I: From Factored Marginal Trajectory Prediction to Interactive Prediction},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
year = {2022},
}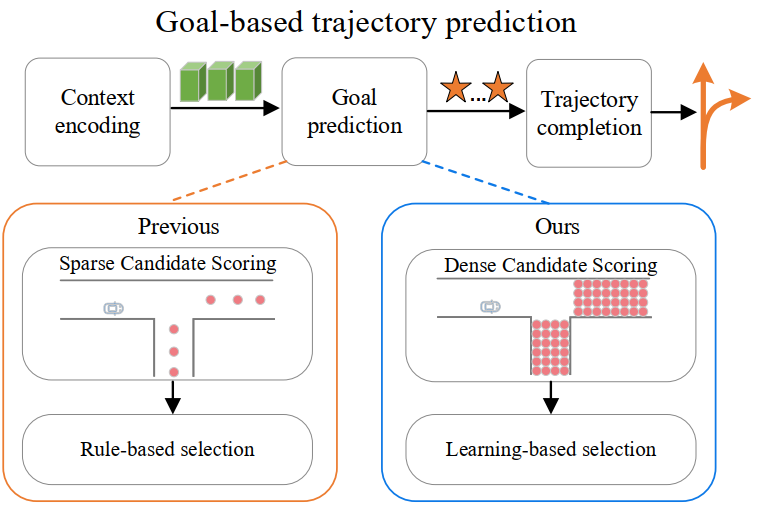
DenseTNT: Waymo Open Dataset Motion Prediction Challenge 1st Place Solution
Junru Gu, Qiao Sun, Hang Zhao
arXiv, 2021
Project Page / Code /
Junru Gu, Qiao Sun, Hang Zhao
arXiv, 2021
Project Page / Code /
@article{Gu:2021aa,
author = {Junru Gu and Qiao Sun and Hang Zhao},
title = {DenseTNT: Waymo Open Dataset Motion Prediction Challenge 1st Place Solution},
booktitle = {arXiv},
year = {2021},
}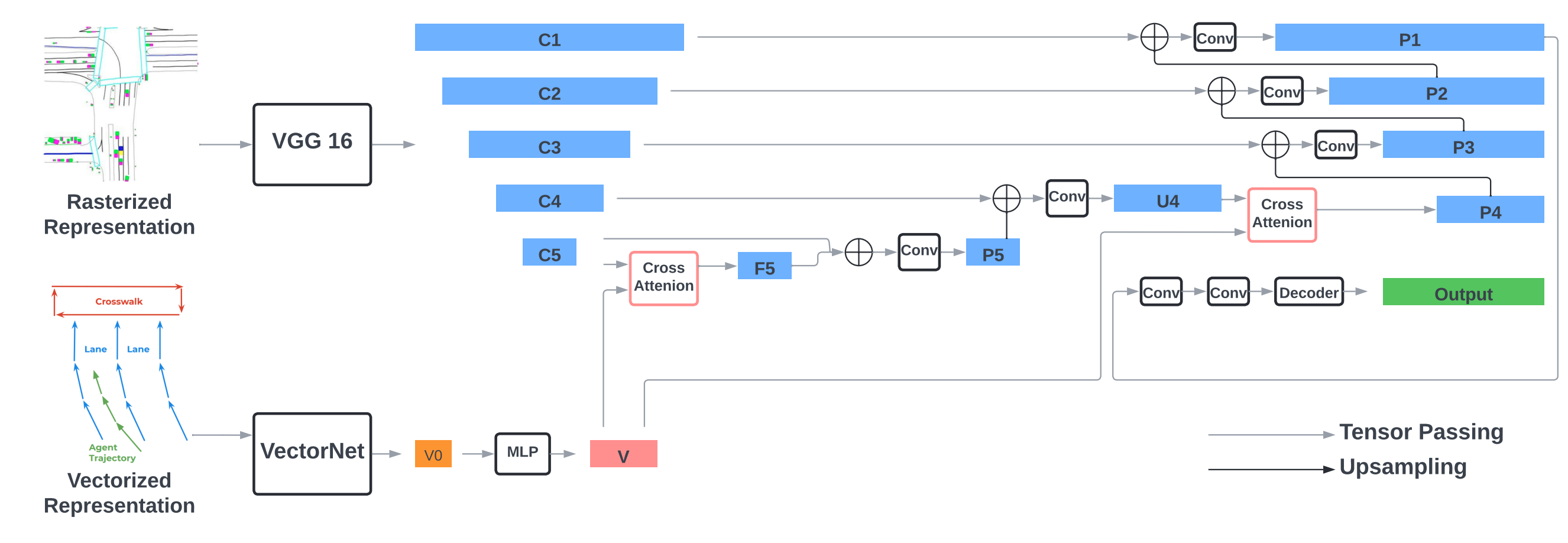
VectorFlow: Combining Images and Vectors for Traffic Occupancy and Flow Prediction
Xin Huang, Xiaoyu Tian, Junru Gu, Qiao Sun, Hang Zhao
arXiv, 2022
Project Page /
Xin Huang, Xiaoyu Tian, Junru Gu, Qiao Sun, Hang Zhao
arXiv, 2022
Project Page /
@article{Huang:2022aa,
author = {Xin Huang and Xiaoyu Tian and Junru Gu and Qiao Sun and Hang Zhao},
title = {VectorFlow: Combining Images and Vectors for Traffic Occupancy and Flow Prediction},
booktitle = {arXiv},
year = {2022},
}